

완전 자율주행까지의 여정 아직 멀어·· 탄탄한 기반을 만드는 시기될 것
[테크월드=이건한 기자] 예나 지금이나 많은 이들이 완전 자율주행차가 도로를 누비는 세상에 대한 긍정적인 미래를 꿈꾼다. 사고율과 교통체증 감소, 공유 차량 증가로 인한 환경 문제 개선, 이동시간을 활용한 생산성 증가 등이 모두 자율주행 시대에 기대되는 대표적인 변화들이다.
하지만 자율주행은 여전히 현재진행형인 미래 기술이다. 기술 측면에서 많은 발전이 이뤄졌지만 여전히 자율주행이 가능한 환경은 전체 도로 대비 제한적이다. 법적인 갈등, 소비자의 인식 개선 등 기술 외적으로 풀어 가야 할 과제도 많다.이런 상황은 아마 올해도 크게 달라지지 않을 것이다. 알면 알아갈수록, 완전 자율주행 시대로 나아가는 길은 우리가 체감하는 것 이상의 긴 여정을 필요로 하기 때문이다.
아직은 요원한 레벨 3 상용화
0에서 5까지 총 6단계로 구성된 자율주행레벨 구분(SAE 기준)에서 현재 시판 중인 대부분의 자율주행차는 레벨 2~2.5(부분 자동화)를 넘지 못하고 있다. 이 단계는 고속도로처럼 안정된 환경에서의 자율주행과 차량 제어를 일부 지원하지만, 운전자는 언제든 즉각 차량의 제어권을 넘겨받을 수 있어야 한다. 사실상 핸들에서 손을 놓는 것 자체가 어렵다 보니, 이를 자율주행으로 부르기엔 부족한 감이 많다.
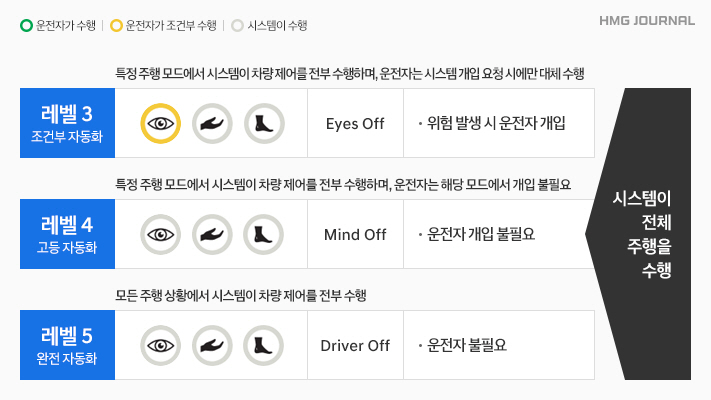
운전자에게 더 많은 자유가 부여되는 레벨 3(조건부 자동화) 이상을 구현한 자동차는 아직 극소수다. 이마저 대부분은 제한된 도로 환경에서 시범운행 중인 연구용 차량이다. 그만큼 실험 단계를 지나 언제쯤 레벨 3 이상에 도달할지는 자율주행에 관심이 많은 사람이라면 다들 궁금해하는 부분이다.
제조사들의 경우 기술력 과시, 시장 선점을 위해 경쟁자보다 먼저 레벨 3 자율주행차를 시장에 출시하길 바란다. 하지만 전문가들이 예상하는 레벨 3 상용화 시기는 아주 일러야 2023~2024년으로, 아직도 몇 년의 시간이 더 필요하다. 그 이상에 도달하기까진 또 얼마나 많은 시간이 필요할지 아직 장담할 수 없다.
무엇보다 자동차는 안전을 최우선으로 하는 보수적인 산업이다. 실제로 수십만km를 주행하고 수십억km를 시뮬레이션 주행하며 학습했다는 대기업의 자율주행 시스템도 여전히 예상치 못한 상황에 대해선 사고를 면치 못하고 있다. 특히 자율주행 중 발생한 사고에 대한 책임 소재가 법적으로 명확히 규정되지 않은 현 단계에서, 이 문제는 기술력을 차치하고 제조사들이 선뜻 레벨 3 자동차를 시장에 출시하기 어렵게 만들고 있다.
물론 자율주행 범위와 사고 책임의 기준을 세우기 위한 세부사항 논의는 수년 전부터 진행돼 오고 있다. 다만 인간이 아닌 기계의 능력과 책임 범위를 규정하는 과정은 논의해야 할 범위가 넓고 그 기준이 세세해 완성까지는 아직 더 많은 시간이 걸릴 것으로 예상된다. 따라서 현재는 레벨 3에 대한 즉각적인 상용화보다 기반 법령과 도로 인프라를 정비하는 과정이 선행되는 단계이며, 2020년에는 이런 움직임들이 보다 구체화되는 모습들이 관찰될 것으로 보인다.
센서 퓨전의 효율적인 고도화
센서(Sensor)는 자율주행차의 눈과 같다. 사람도 시각을 통해 운전에 필요한 대부분의 정보를 얻듯이, 자율주행차도 레이더, 라이다, 카메라 같은 시각적 센서를 통해 많은 정보를 얻는다.
카메라는 인간의 눈과 비슷한 조건에서 딥러닝 이미지 분석을 통해 사물의 종류와 색을 판단할 수 있고 가격이 상대적으로 낮다는 장점이 있지만, 눈과 비 같은 악천후에 취약하다. 레이더는 전방에 전파를 발사해 날씨와 관계없이 중장거리의 물체를 모두 감지할 수 있는 것이 장점이다. 그러나 사물의 정확한 형체를 파악하긴 어렵다. 또 라이다(LiDAR)는 촘촘한 레이저를 발사해 만든 점을 취합해 사물의 형태와 현재 거리를 정교하게 측정할 수 있어 자율주행에 널리 활용되고 있다. 반면 카메라, 레이더와 비교해 압도적으로 비싼 가격과 악천후에 취약한 부분이 단점이다.
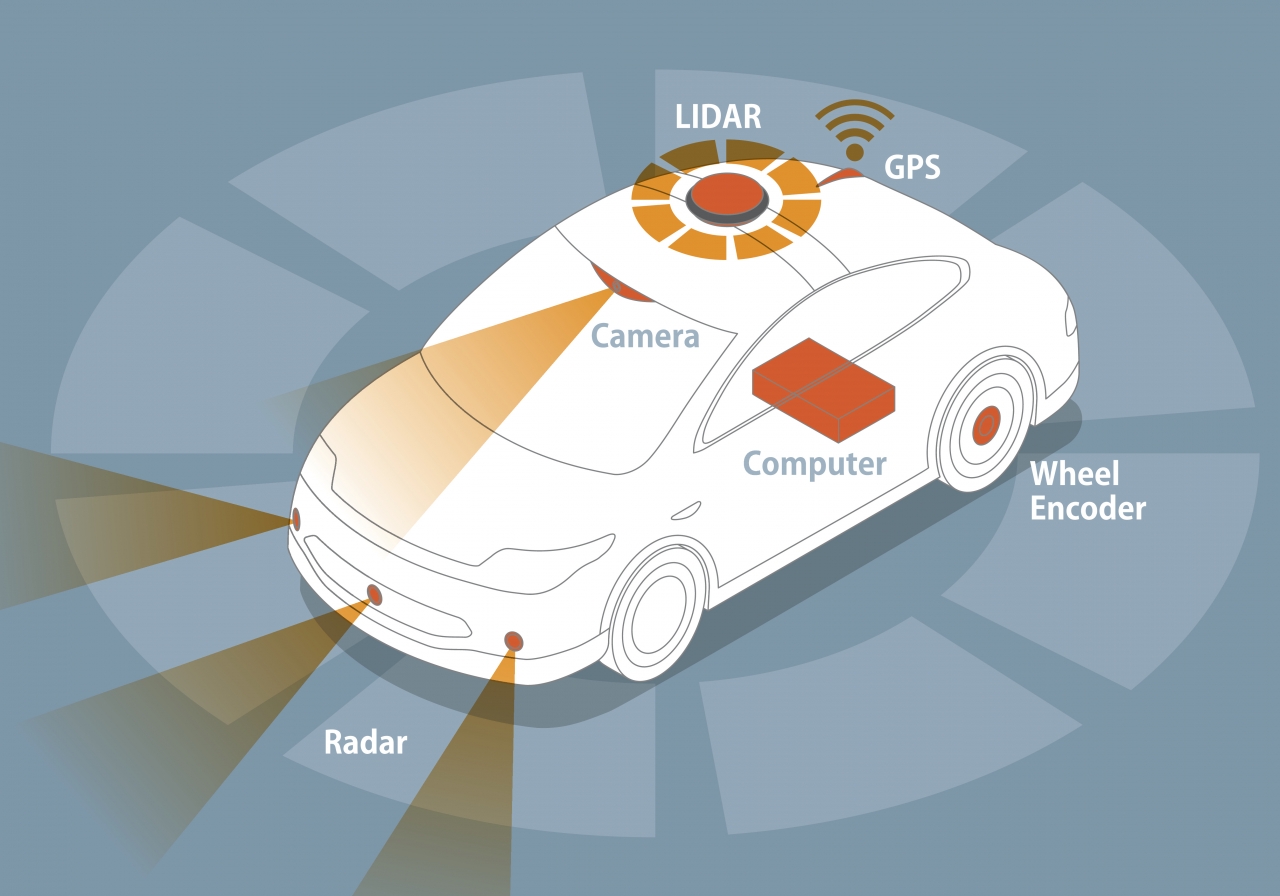
이처럼 각 센서는 각각 뚜렷한 장단점을 지니고 있어 어느 하나만 가지고는 자율주행을 구현하기 어렵다. (테슬라 정도만이 거의 유일하게 라이다 대신 카메라 위주의 자율주행 시스템을 구현하고 있음) 따라서 대부분의 자율주행차는 이들 센서를 중복으로 탑재해 서로의 장단점을 보완하고 있으며, 이를 센서 퓨전(Sensor Fusion)이라고 부른다.
센서 퓨전은 안정적인 자율주행 구현을 위해 반드시 필요한 기술이지만 아직 기술적으론 많은 발전이 필요하다. 현재는 독립된 각 센서가 수집하는 정보를 보다 신속하고 유기적으로 취합하기 위해 센서를 하나로 통합하거나 이들을 제어하는 반도체 성능을 강화하는 식의 개선 방안들이 주로 연구되고 있다. 혹은 최근 새롭게 주목받고 있는 4D 이미지 레이더처럼 기존 센서의 기능 범위를 넘으면서도 가격 경쟁력을 갖춘 센서의 개발도 보완 대책의 일부로 꼽힌다.
센서 퓨전을 통해 여러 센서를 중첩할수록 자율주행 안전성은 증대되지만 그로 인한 차량 가격 상승, 설계 디자인의 제한 발생은 아직 극복해야 할 현실적인 문제다. 또한 안전성과 상품성 사이의 합리적인 기준을 찾아야 하는 제조사들의 고민은 올해도 이어질 것으로 보인다.
V2X, 자율주행차를 위한 자율주행 인프라
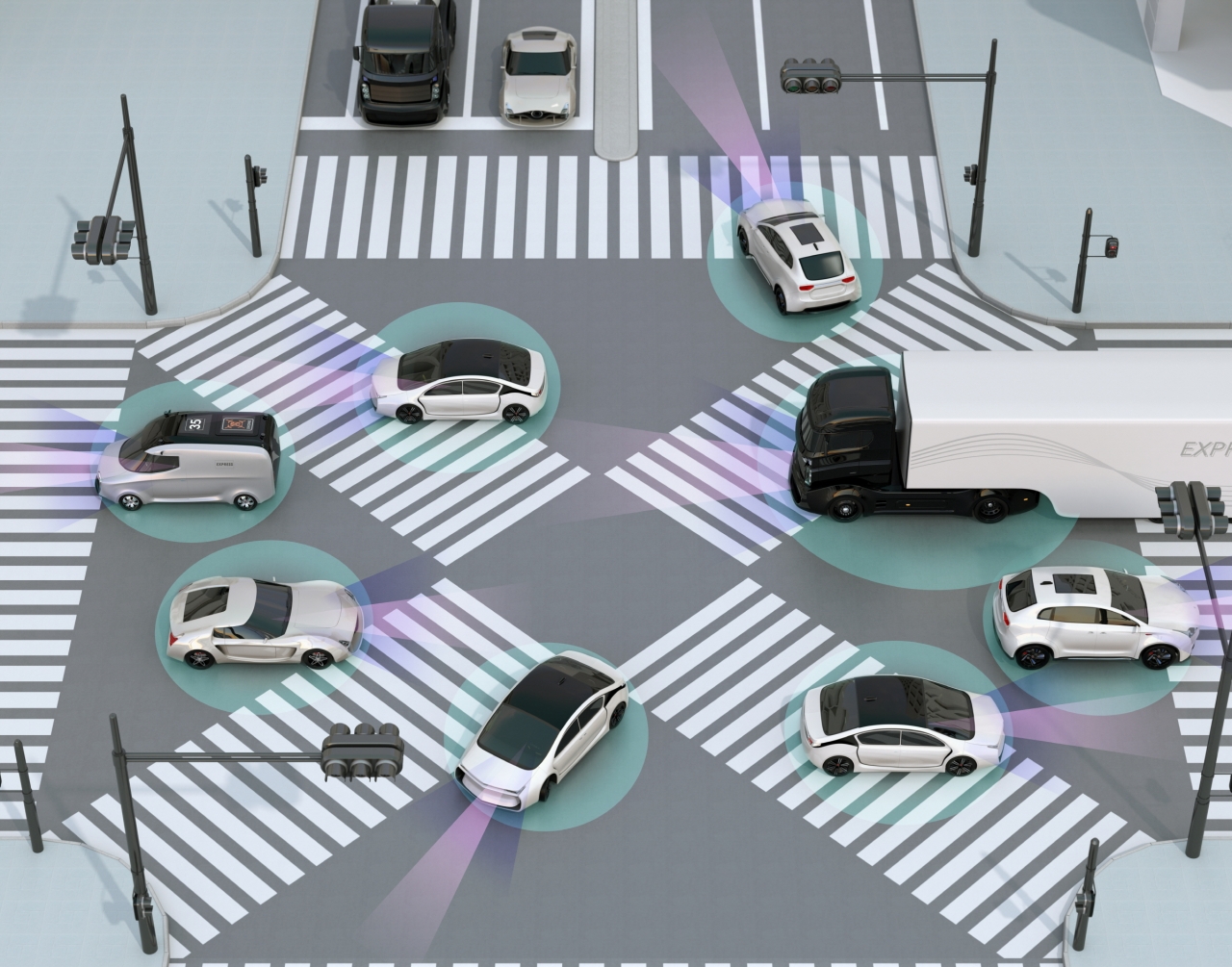
V2X(Vehicle-to-Everything)는 차량이 무선 네트워크를 통해 주변 환경과 소통할 수 있는 기술을 통칭한다. 크게 V2N(차량과 네트워크), V2V(차량과 차량), V2I(차량과 도로 인프라), V2P(차량과 사람) 등으로 구분하고 있다. V2X의 목표는 차량과 운전자에게 주변에 대한 정보를 실시간으로, 혹은 앞서 제공함으로써 사고를 방지하고 보다 효율적인 주행 코스를 선택할 수 있도록 돕는 것이다.

V2X의 보다 구체적인 활용 분야는 ▲회전하는 차량, 멈춰 있는 차량에 대한 사전 통신을 통한 충돌 회피 ▲도로 폐쇄나 공사처럼 운전에 영향을 미칠 수 있는 정보 수신 ▲보행자, 자전거 이용자와의 이동 정보 공유 ▲차량 원격 모니터링 ▲전방 카메라 영상, 센서 수집 정보를 후방 차량에게 전송하는 시스루(See-through) ▲다수의 차량이 선두 차량을 따라 자동으로 운행하는 군집주행 구현 등이 있다.
이는 모두 자율주행의 사고율을 낮추고 유기적인 차량 흐름을 가능케 하는 것들이다. 또한 MaaS(Mobility as a Service)로 불리는 미래 주문형 자율주행 서비스의 구현을 위해서도 V2X 실현은 중요한 과제다.
하지만 V2X 구현에 필요한 네트워크와 도로 인프라를 자동차 제조사가 단독으로 구현할 수는 없기에 이 부분은 특히 적극적인 정부의 지원과 민관 협력이 요구된다. 지금까지는 주로 화성시 K-City처럼 일부 지역에 조성한 테스트단지를 중심으로 한 정부 지원이 주를 이뤘다면, 본격적인 자율주행 기술 실증과 고도화 흐름이 이어질 올해는 전국 주요 지역에 V2X 시범 단지들이 새롭게 선정될 것으로 예상된다.

특히 정부는 작년 12월에 발표한 ‘미래 차 국가 비전’에서 2024년을 완전 자율주행차 상용화 시기로 발표했다. 전문가들의 예상보단 이른 목표치지만 이를 위해 4대 핵심 인프라인 C-ITS(지능형 교통체계), 정밀도로 지도, 교통 통합연계시스템, 자율주행차 센서 인식에 최적화된 신호등·안전표지·차선 등을 하나씩 확보해 나간다는 방침이다. 그러나 이들 모두 구축까지 상당한 시간이 필요한 작업인 만큼 올해는 각 사업의 뼈대를 마련하기 위한 움직임들이 주로 나타날 것으로 전망된다.
그래도 삭제하시겠습니까?