

제조사와 운전자의 면책 범위 조정, 그리고 폭넓은 산업 협력
[테크월드=이건한 기자] 영화에서나 보던 ‘자율주행’이 어느덧 낯설지 않은 시대다. 수년 전 테슬라의 차량 자율주행 시스템 ‘오토파일럿’이 크게 히트를 친 이후 자율주행차에 대한 관심과 개발 열풍은 전 세계로 퍼져 나가기 시작했다. 초기엔 자율주행에 다소 미온적인 반응을 보이던 글로벌 자동차 업체들도 이젠 앞다퉈 자사의 브랜드를 건 자율주행차를 속속 내놓고 있다.
하지만 어딘지 모르게 아쉬운 마음이 든다. 사실 ‘진짜 자율주행’이라고 부를 만한 차는 여전히 찾아볼 수도, 구입하기도 어렵기 때문이다. 지금 우리가 자율주행차이라고 부르는 것들은 운전자가 돌발상황에 대해 언제든 운전대를 잡을 준비가 필요한 반쪽짜리다.
국제자동차기술자협회(SAE)의 6단계 자율주행 구분을 기준으로 현재의 시중의 자율주행은 레벨 2~2.5(부분 자동화)와 극히 소수의 레벨 3(조건부 자동화)에 머물러 있다. 이들 단계는 넓고 한적한 길이나 고속도로에서는 괜찮지만, 복잡한 도심에서는 여전히 안전을 장담할 수 없는 수준이다.
따라서 진정한 자율주행이라고 한다면 적어도 레벨 4(고도 자동화) 정도는 돼야 한다. 레벨 4부터는 돌발상황이 닥쳐도 차량이 운전자의 조력 없이 스스로 위험을 회피하거나 피해를 줄이는 식의 자율적인 판단이 가능해지는 최소한의 시스템이 구현되는 단계이기 때문이다. 물론 지금도 몇몇 ‘레벨 4를 구현했다’고 말하는 회사들이 있지만 이 역시 극히 제한된 구역에 한해서, 택시나 셔틀버스 등에 한해서다. 당장 레벨 3 이상이 널리 상용화 되는 시점도 2021년 이후로 바라보는 시각이 적지 않다.
어쨌든 자율주행을 레벨 4 이상으로 정의한다면, 곧바로 다음의 질문이 따른다. ‘그렇다면 고레벨 자율주행차는 대체 언제쯤 살 수 있게 될까?’ 이에 관해선 여러 시각의 차이가 존재하지만, 지난 12월 6일 세미나허브가 여의도 중소기업회관에서 개최한 자율주행자동차 기술동향과 미래전략 세미나’에서 현대모비스의 김학구 책임 연구원이 들려준 이야기들은 꽤 흥미롭게 전해진다.

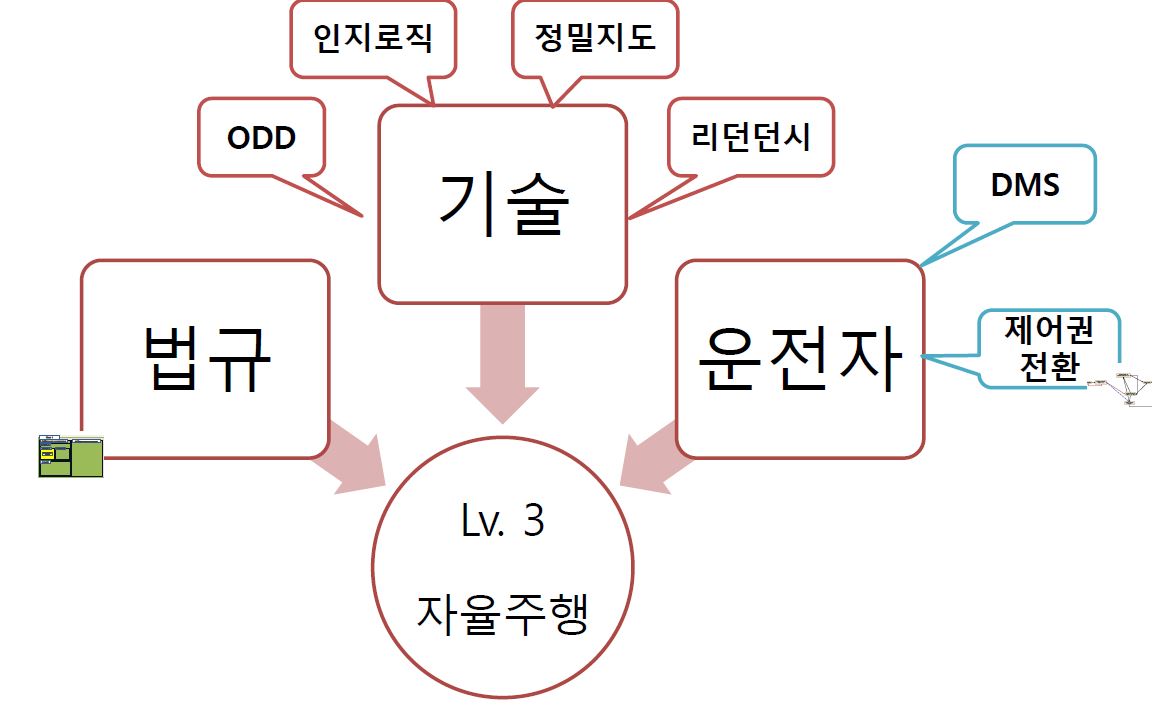
김학구 책임은 높은 완성도의 자율주행차 구입은 당분간 어려울 것이란 견해를 밝혔다. 몇몇 현실적인 문제들이 아직 해결되지 않았기 때문이다. 대표적으로 ‘Fallback ready user’, 즉 운전자의 운전 복귀 시스템이 아직 고도화되지 않은 점이 있다. 앞서 설명한 것처럼 현재의 차량 자율주행 시스템은 차량이 판단할 수 없는 상황이나 시스템으로 회피할 수 없는 사고 상황이 닥치면 운전자가 길어도 10초 이내에 차량으로부터 운전권을 넘겨받아(Fallback) 상황을 해결해야 한다.
그런데 이것을 어떻게 시스템화 할 수 있을까? 운전하는 내내 자율주행차가 운전자를 모니터링(DMS)한다고 해도, 위험을 알린다고 해도 실제 사고를 앞두고 자동차가 운전자를 확실하게 복귀시킬 수 있다는 장담은 없다. 이 경우 사고 발생에 대한 책임 범위를 구분하는 것도 것도 쉽지 않으며, 이를 위한 법적 판단 근거도 아직 마련되지 않은 상태다.
특히 제조사 입장에서는 사고 면책 범위가 확실히 정해지지 않는 이상, 시장에 고레벨 자율주행차량을 출시하는 것에 큰 부담을 느낄 수밖에 없다. 김 책임에 따르면 이 문제에 대해 이미 5년여 전부터 새로운 법규와 세부안들이 논의되고 있지만 굉장히 세세한 부분까지 명문화하는 과정에서 많은 시간이 소요되고 있다고 한다.
예를 들어 ‘운전자가 핸들을 얼마나 꽉 쥐는지, 혹은 눈을 얼마나 깜빡이고 있어야 폴백이 가능한 상황이라고 판단할 수 있는가’ 같은 내용들이 논의에 포함된다는 것이다. 이 내용들은 곧 미래 자율주행 환경 구현과 분쟁 해결을 위한 핵심적인 기준안으로 인용될 것이기 때문에 하나의 문항을 구성하는 데에도 생각보다 많은 논의가 필요하게 된다. 더불어 해외에도 제품을 팔아야 하는 글로벌 제조사 입장에서는 막상 외국의 규제가 한국과 또 다를 것도 자율주행차 출시 시기를 늦추게 되는 현실적인 어려움으로 다가온다.
결국 무엇보다 법적인 문제들이 단기에 해결되긴 어려운 상황이기 때문에 레벨3 수준의 자율주행차라도 시장에 쉽게 내놓을 수 없게 되는 것이다. 이는 기술력과는 별개의 문제다. 안정적인 환경만 갖춰진다면 기술적으로 레벨 4 구현도 현재 구현은 가능하며, 택시와 셔틀 등 법이 보호하는 구간을 주행하는 환경에서는 실제 레벨 4 자율주행이 시범 서비스되는 사례도 일부 찾아볼 수 있다.
하지만 기술적 측면에서도 레벨 4 이상으로 넘어가려면 제조사는 운전자에게 제시하는 ODD(Operational Design Domain), 즉 자율주행에 대한 제한 조건 없이도 모든 환경에서 주행이 가능한 기술 수준을 달성해야 한다. 문제는 이것이 차량에 장착된 로컬 센서만으론 실현하기 어렵다는 점이다. 이는 차량의 인지 범위를 넘어 미리 도로 환경이나 상황을 정밀하게 판단할 수 있는 고급 지도(HD맵)나 네트워크 시스템(C-ITS)이 수반돼야만 해결할 수 있는 문제들이다.
그러나 차량 외적인 자율주행 인프라 구현은 제조사 혼자만의 노력으로 이뤄지는 것이 아니라 다방면의 기술 협력과 정부 차원의 정책 지원이 따라야만 가능한 일이다. 우리 정부는 최근 레벨 4 이상의 국내 완전자율주행 인프라 구축 완성을 2027년으로 설정하고 제도와 시스템을 정비하고 있는 중이다.
하지만 실제 완전 자율주행으로 가기 위해 넘어야 할 여러 문제를 고려해보면 2027년도 그리 넉넉해 보이지 않는 것이 현실이다. 향후 자동차 산업을 이끌어 갈 핵심 영역 중 하나인 완전 자율주행 시스템의 조기 구현과 상용화를 위해 기업과 정부 간의 긴밀한 대화와 협력이 지속해서 이뤄져야 할 것으로 보인다.
그래도 삭제하시겠습니까?