

자율주행차의 상용화를 위해서 필요한 것은?
[테크월드=양대규 기자] 잘 알려져 있다시피 구글은 꽤 오래 전부터 엄격한 통제 하에 자율주행과 관련된 연구를 해 왔다. 그리고 일단의 자동차 회사들이 이 흐름에 합류하면서 각자 시제품 테스트를 진행하고 있다. 전 세계 정부들도 자율주행 자동차가 일으킬 법규적인 문제들을 검토하고 있다. 자율주행 쪽으로 진출하고 있는 회사는 자동차 회사들뿐만 아니다. 델파이와 애플 같은 세계적인 테크놀로지 회사들도 이 기술과 관련해서 분주히 움직이고 있다. 어떤 애플리케이션이 어떻게 힘을 받고 있느냐 하는 것을 알 수 있는 좋은 징표가 메이저 회사들에 인수되는 스타트업 숫자일 것이다. 톰톰, GM, 우버 같은 회사들 모두가 관련 인수에 열을 올리고 있다.

자율 자동차의 비약적인 발전을 보여준 것은 2015년 아우디 A7이 샌프란시스코에서 라스베이거스까지 주행한 것이다. 550마일(885km)에 걸친 이 주행으로 이 기술이 실제 세상으로 걸어 나왔다. 자율 자동차의 가장 까다로운 해결 과제 중의 하나가 나쁜 기상 조건이다. 포드는 자사의 시제품을 미시간에서 2016년 1월의 눈길에 노출시키는 것으로 기상 조건 테스트를 시작했다. 이것은 자사 시제품의 라이다와 CMOS 카메라 센서가 이런 조건에서도 잘 작동한다는 것을 과시하기 위한 것이었다. 눈은 센서에 심한 반사를 일으키기 때문에, 일반적으로 이런 테스트는 매우 혹독한 테스트로 여겨진다.
스웨덴 자동차 회사인 볼보 역시도 자사의 전문성을 과시하기 위해서 오스트레일리아 서부 지역에서 테스트를 진행했다. 이 회사는 또 스웨덴의 구텐베르크에서 자율주행 자동차 대여 사업 시작을 발표했다. 볼보의 시제품 자동차는 이 회사의 SC90을 바탕으로 하고 있다. XC90을 개조하기 위해서 핵심적 역할을 하는 것이 엔비디아(NVIDIA)의 Drive PX 2 프로세싱 카드이다. 이 카드가 카메라, 라이다, 레이더를 비롯해서 이 자동차의 각종 센서들로부터 데이터를 수집하고, 융합하고, 분석하는 일을 맡는다.
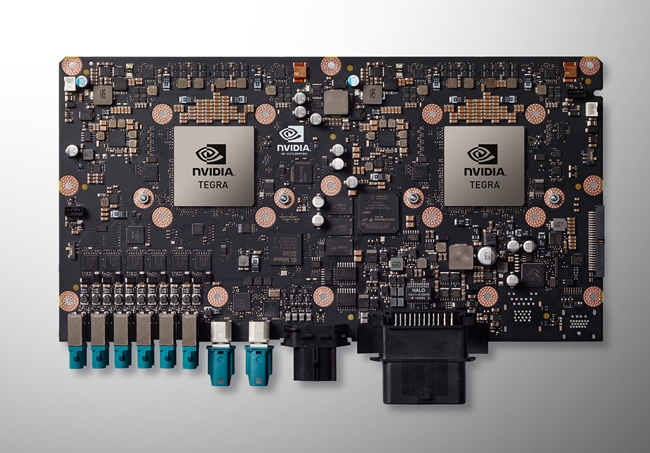
엔비디아 Drive PX 2 카드의 핵심은 Parker 칩으로서, 이 칩은 6개의 64비트 CPU를 포함한다. 2개의 2세대 ARM 기반 Denver 코어와 4개의 ARM Cortex A57 코어이다. 이 6개 CPU 코어에 256개 GPU를 결합함으로써 총 1.5테라플롭스에 달하는 프로세싱 성능을 제공한다.
자율 자동차 혁신에 뛰어들어서 이런 자동차로 뛰어난 경제성이 가능하다는 것을 보여주는 또 다른 회사가 있다. 프랑스 회사인 Navya이다. 이 회사는 회사명과 같은 Navya라는 이름의 대중 교통용 무인 자동차를 개발했다. 이 차는 EDF의 핵발전소에서 실제로 임무에 투입되어서 한 번에 16명을 수송할 수 있다. Navya는 기존의 버스를 대체하기 위해서 개발됐다. 이를 도입함으로써 이 프랑스 에너지 회사는 연간 300만 유로 이상의 비용을 절감하게 됐다.

볼보와 Navya는 유럽의 사례 중에서 일부에 불과하다. 유럽 지역에서는 이보다 훨씬 많은 자율 자동차 혁신 사례들을 볼 수 있으며, 특히 대중 교통 분야에서 그렇다. 프랑스 회사인 EasyMile의 WEpod은 EU의 CityMobil2 프로젝트의 일환으로서 핀란드 반타와 스위스 로잔에서 이미 1만 6000명 이상을 실어 나르고 있다. 또 다른 주목할 만한 자율 시스템은 네덜란드 회사인 2getthere가 개발한 것으로서, 마스다르 시티에 도입됐다. 이 사례의 특징적인 점은, FROG(Free Ranging On Grid)라고 하는 시스템을 사용해서 레일과 케이블을 대체한다는 것이다. 이 기술은 마그넷(자석)을 사용하며, 도로 상에 2m 간격으로 마그넷이 심어져 있다. 이 마그넷이 자율 자동차에 기준점이 된다. 바퀴 회전으로 거리를 측정하고 시작점으로부터의 위치를 계산할 수 있다.
마스다르 사례는 컨셉트 검증 용으로 사용되고 있으며, 팟카라고 하는 것으로 지능과 자율성을 확대하기 위한 추가적인 연구가 진행되고 있다. 주로 팟카의 거리와 동작 조건을 확장하기 위한 것이다. 에인트호번 공과대학의 400만 유로 연구 프로그램은 팟카를 가상의 열차처럼 사용하는 것을 연구한다. 팟카는 CACC(Cooperative Adaptive Cruise Control)라고 하는 시스템을 사용해서 무선으로 통신한다. 이 연구가 실용화되면 팟카들이 짧게는 0.3초 간격으로 주행할 수 있게 된다.

자율주행과 관련해 가장 이목을 집중시킨 뉴스는 우버가 이 시장에 진출했다는 것이다. 우버는 카네기 멜론 대학의 연구 그룹을 통째로 매입했다. 그리고 이로부터 획득한 소프트웨어를 사용해서 피츠버그에서 포드 Focus와 볼보 XC90 택시를 도입했다. 이들 차량은 자율적으로 운행되는데, 운전자가 여전히 탑승하는 것은 비상 시에 개입하기 위해서다. 자율 택시에 관심을 드러낸 회사는 우버뿐만 아니다. 싱가포르 회사인 nuTonomy도 자율 택시를 도입하고 있다.
우버는 오토(Otto)를 사들이며, 사람들의 흥미를 더욱 끌었다. 오토는 자율 트럭 용의 소프트웨어와 시스템을 개발하는 회사였다.

오토와 경쟁 관계인 유럽 회사로 다임러-벤츠를 들 수 있다. 이 회사 역시 당연히 자체적인 자율 자동차를 연구하고 있다. 트럭으로 군집주행(Platooning)이라고 하는 기법을 사용함으로써 트럭들이 보통보다 서로 훨씬 더 가깝게 주행할 수 있으므로 교통 체증을 줄이고 연비를 높일 수 있다. 이렇게 트럭들이 서로 가깝게 주행할 수 있는 것은 레이더 센서를 사용해서 가속과 제동을 제어함으로써 가능하다. 이들 트럭은 여러 방식의 센서들을 결합적으로 사용한다. 원거리를 위해서는 전방 센서로 250m 거리가 가능하고 18° 시야각으로 스캔할 수 있다. 더 넓은 그림을 얻기 위해서 근거리(70m) 레이더 센서를 사용해서 트럭 전방으로 130° 시야각으로 스캔할 수 있다. 이 두 레이더 센서에 스테레오 카메라를 결합할 수 있다. 이 카메라는 거리는 100m이고 수평으로 45°, 수직으로 27°를 스캔할 수 있다. 이 세 센서를 결합함으로써 다수의 차선에 걸쳐서 전체적인 도로 상황을 파악할 수 있다. 움직이거나 정지해 있는 물체, 보행자, 교통 신호등, 도로 조건 같은 것들을 감지할 수 있다. 카메라는 트럭 주변 공간을 살피는 데도 유용하다.
이처럼 다양한 형태의 자율 자동차로 기술은 이미 자리를 잡고 있다. 무인 자동차의 발전에 걸림돌이 되는 것은 법규의 미비이다. 공공 도로에서 자율 주행을 테스트하고 운행하기 위해서는 법규적인 틀이 마련되어야 한다. 최근까지만 하더라도 도로 상에서 무인 자동차를 운전자 없이 시험하는 것이 불가능했다. 하지만 이 상황 역시도 변화를 맞고 있다.
미국은 연방 자동화 자동차 정책(Federal Automated Vehicles Policy)을 통해서 특정한 상황에서 완전 자율을 허용하고 있다. 고도 자동화 자동차 정책(Highly Automated Vehicles Policy) 역시도 주행 제어와 운전자 지원 시스템 같은 좀더 하위 수준의 자율성을 포함해서 자동화 자동차에 관한 일부 법규들을 다루고 있다.
또한, 자율 자동차 개발에 관심을 가진 회사나 기관들을 위해서 필요한 자료들도 나왔다. 더 가이던스(The Guidance)는 자율 자동차를 안전하게 개발하고, 시험하고, 주행하고, 운행하기 위한 15가지 항목을 설명하는 “안전성 평가(Safety Assessment)” 자료를 제공한다.
더 가이던스의 “안전성 평가” 자료는 어떻게 좋은 설계를 할 수 있는지에 관한 가이드라인을 제공할 것이다. 물체 감지, 사고 감지, 도로 안전성뿐만 아니라 시스템 고장 시에 AI가 어떻게 해야 하는지에 관한 것까지 포함한 다양한 주제에 관해서 조언한다. 디자인이 어떻게 작동해야 하는지 뿐만 아니고, HAV 시스템을 검증하는 것도 포함한다. 사이버 보안과 데이터 기록, 공유에 관한 조언도 담는다.
법규를 충족하는 가장 손쉬운 방법은 검증된 하드웨어와 소프트웨어를 보유한 회사와 손을 잡는 것이다. 그런 회사로서 Autonomous Stuff가 개발한 Automated Research Development Platform은 개발자들이 각자의 필요에 맞게 맞춤화할 수 있는 R&D 플랫폼이다. 이 플랫폼은 자율 자동차를 연구하는 대학의 관련 학과들에서 널리 사용되고 있다. 이 플랫폼 말고도, 많은 대학들에서 연합적인 하드웨어, 소프트웨어를 사용하고 있다. 여기에 참여하고 있는 기관들로는 카네기 멜론 대학, 미시간 대학, MIT, 스탠포드, UC 버클리를 포함한다.
자율 자동차의 비약적인 발전이 이뤄지고 있다. 많은 회사와 기관들이 오래 전부터 계속해서 연구를 하며, 시제품이 충분히 견고해지고 도로에 나가서 시험을 할 수 있는 법규적인 토대가 마련되고 있다.
앞으로 더 많은 흥미로운 일들을 목격하게 될 것이다. 기술이 더 성숙하고 디자이너들이 더 나은 방법들을 발견할 것이기 때문이다. 세계 각지에서 더 많은 자율 주행 승용차와 트럭이 실제 세상으로 등장할 것이다. 기술이 완전히 성숙하기 전까지는 해결해야 할 난관들이 많이 남아있기는 하지만 말이다.
이런 난관들 때문에 기술 개발이 느려지지는 않을 것이다. 과거의 성공을 발판으로 기술 개발이 더욱 가속화할 것이다.
글: 마크 패트릭(Mark Patrick)
자료제공: 마우저 일렉트로닉스
그래도 삭제하시겠습니까?