

[테크월드=선연수 기자] 이번 글에서는 산업 자동화용 모터 제어를 위해 위치 센싱 인터페이스를 설계할 때, 설계자가 해결해야 할 과제에 대해 알아본다. 자동화 장비나 로봇을 작동하기 위해서는 인코더로부터 정보를 포착해 정확한 모터 위치를 측정해내는 것이 중요하다.
즉, 어떻게 해야 더 작은 크기로 보다 빠르고 정확하게 위치를 감지하느냐가 관건이다. 이런 시스템에서는 분해능이 높은 고속 듀얼 동기 샘플링 아날로그-디지털 컨버터(ADC, Analog-to-Digital Converter)가 중요한 역할을 수행할 수 있다.
신시장이 요구하는 초소형 모터
한정된 PCB 면적에 매우 작은 부품들을 탑재하도록 해주는 픽-앤-플레이스(Pick-and-place) 장비에서, 정밀한 드라이버와 컨트롤러를 구현하기 위해서는 위치, 속도, 방향과 같은 모터 회전 정보를 정확하게 측정해야 한다. 최근 의료용 수술 로봇, 항공우주·방위 분야의 드론 등 새로운 애플리케이션에 적용하기 위해 모터 제어부의 크기가 초소형화되고 있다.
크기가 작은 모터 컨트롤러는 산업용과 상업용 분야의 새로운 애플리케이션에 활용하기 적합하다. 이때 설계자에게 발생하는 과제는, 고속 애플리케이션에서 위치 피드백 센서의 높은 정확성을 달성하면서도, 로봇 팔과 같이 매우 제한적인 PCB 공간에 필요한 모든 부품을 집어넣어야 하는 것이다.
모터 제어 피드백 시스템
모터 제어 루프는 크게 모터, 컨트롤러, 위치 피드백 인터페이스로 구성된다[그림 1]. 모터가 회전 샤프트(Shaft)를 돌리면 장비의 팔이 작동하는 방식이다.
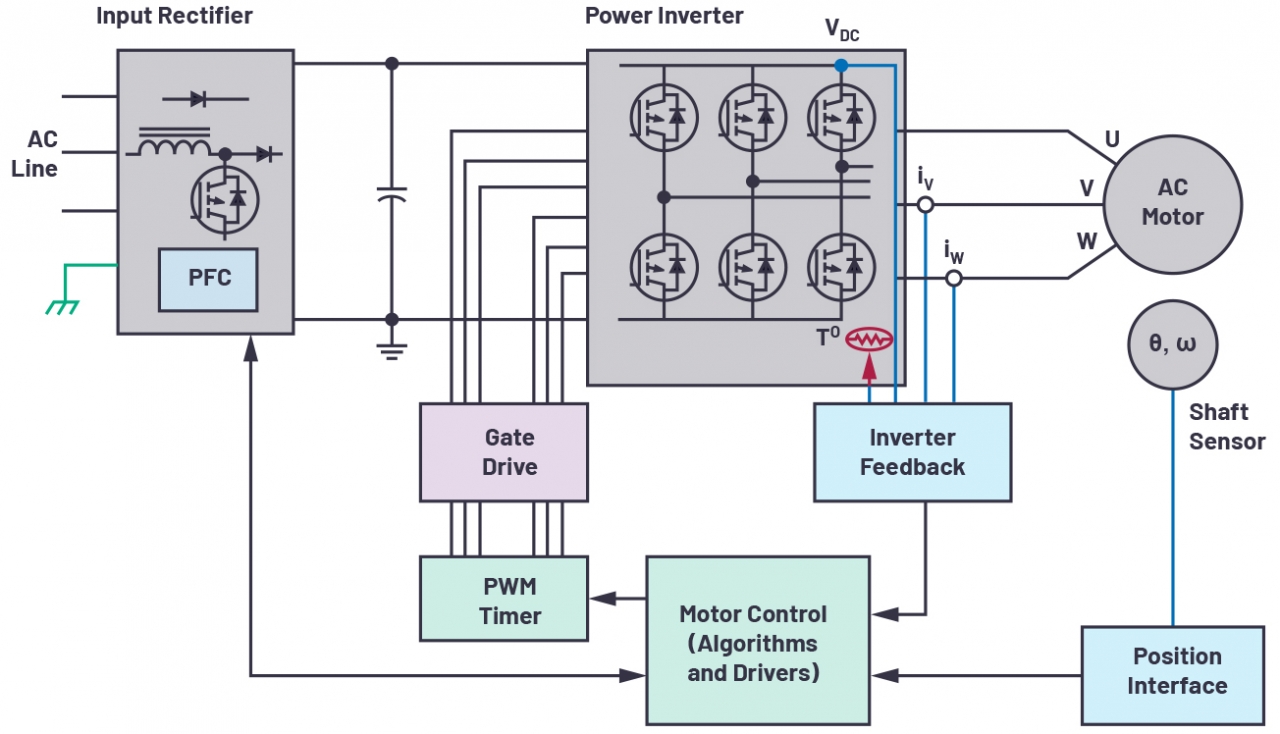
모터 컨트롤러는 모터가 힘을 가할지, 정지할지, 계속해서 회전할지를 알려준다. 위치 인터페이스는 컨트롤러에 회전 속도와 위치 정보를 제공한다. 크기가 작은 표면 실장 부품들을 탑재하기 위한 픽-앤-플레이스 같은 장비가 적절히 동작하려면 이 데이터가 중요하다. 이런 모든 애플리케이션은 회전 물체의 정확한 위치 측정 정보를 요구한다.
위치 센서는 분해능이 높아야 한다. 그래야 모터 샤프트 위치를 정확하게 탐지하고, 작은 부품들을 적절하게 집어 올리고, 보드 상에 정확하게 탑재할 수 있다. 모터 회전 속도가 높을수록 더 높은 루프 대역폭을 확보할 수 있고 지연시간 요구 수준을 낮출 수 있다.
모터 위치 피드백 시스템
로우엔드(Low end) 애플리케이션은 증분형 센서와 비교기를 함께 사용해 위치를 충분히 측정해낼 수 있으나, 하이엔드(High end) 애플리케이션에는 더 복잡한 신호 체인이 필요하다. 이런 피드백 체계는 위치 센서, 아날로그 프런트엔드(AFE, Analog Front-end) 신호 컨디셔닝, ADC, 드라이버 순으로 이어지고, 이후 데이터는 디지털 도메인으로 넘어간다[그림 2].
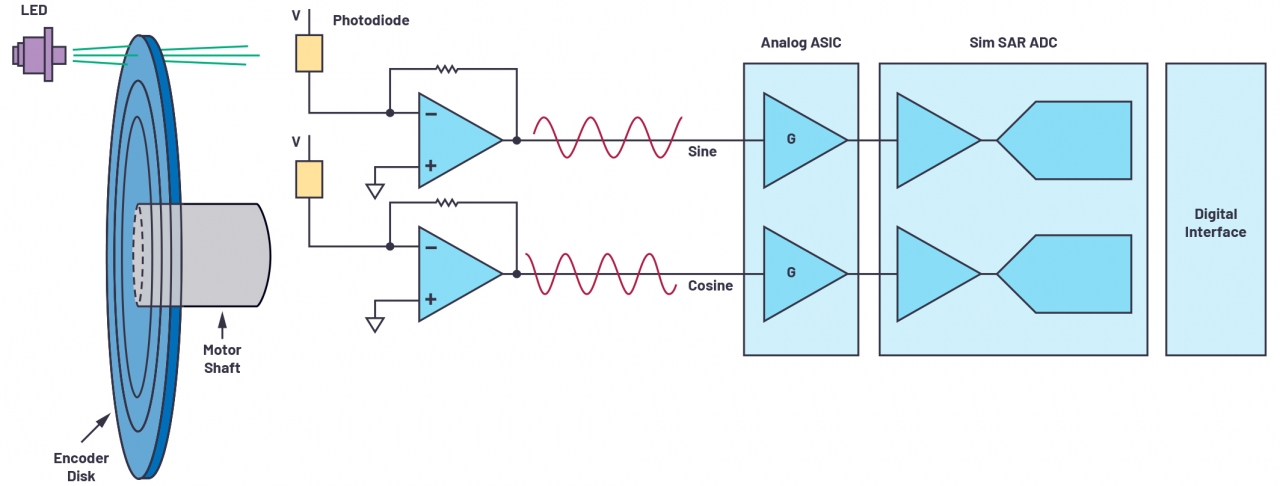
광학 인코더는 매우 정밀한 위치 센서 중 하나로, LED 광원, 모터 샤프트에 부착된 디스크, 광검출기로 이뤄져 있다. 디스크는 불투명 영역과 투명 영역으로 구성된 패턴이 새겨져, 빛을 차단하거나 통과시킨다. 그 결과 발생한 빛은 광검출기에 의해 검출되고, 온/오프(On/Off) 빛 신호는 전기 신호로 변환된다.
디스크가 회전할 때, 광검출기는 디스크 패턴에 따라 mV나 µV 대의 낮은 사인·코사인 신호를 생성한다. 이는 절대 위치 광학 인코더에서는 일반적인 시스템이다. 생성된 신호를 아날로그 신호 컨디셔닝 회로로 보내면, 디스크리트 증폭기나 아날로그 PGA로 구성된 회로가 동적 범위를 극대화하도록 ADC 입력 전압 범위에 적합한 1Vp-p 범위의 신호를 얻는다. 증폭된 사인·코사인 신호는 동시 샘플링 ADC의 드라이버 증폭기로 이동된다.
사인·코사인 데이터 포인트를 정확히 동일한 시점에 얻기 위해서는 ADC가 채널들을 통해 동시 샘플링을 해야 한다. ADC 변환 결과는 ASIC이나 마이크로컨트롤러로 전달된다. 모터 컨트롤러는 매 PWM(Pulse Width Modulation) 주기(Cycle)마다 인코더 위치를 묻고, 수신한 명령과 위치 데이터를 바탕으로 모터를 구동한다. 과거에는 시스템 설계자가 제한적인 보드 풋프린트에 적합하도록 ADC 속도나 채널 수를 절충해야 했다.
위치 피드백 최적화
기술 발전에 따라 모터 제어 애플리케이션도 진화되면서, 더 높은 정확도의 위치 검출 기술이 요구되고 있다. 그중 광학 인코더 분해능은 디스크에 초미세 리소그래피 기술을 사용해 새긴 슬롯 수에 따라 결정되며, 슬롯 수는 대개 수백~수천 개에 이를 수 있다. 고성능 ADC는 사인·코사인 신호들을 고속으로 보간해(Interpolating) 인코더 디스크에 대한 시스템 변경 없이도 인코더 분해능을 높일 수 있다.
[그림 3]은 인코더 사인·코사인 신호를 느린 속도로 샘플링 하면 더 적은 수의 신호 값을 포착하는 것을 나타낸다. 이 경우 위치 정확도는 제한적이다. 반면, ADC가 더 빠른 속도로 샘플링할 경우 더 많은 신호 값을 포착해내 위치를 더 정확하게 판단할 수 있다.
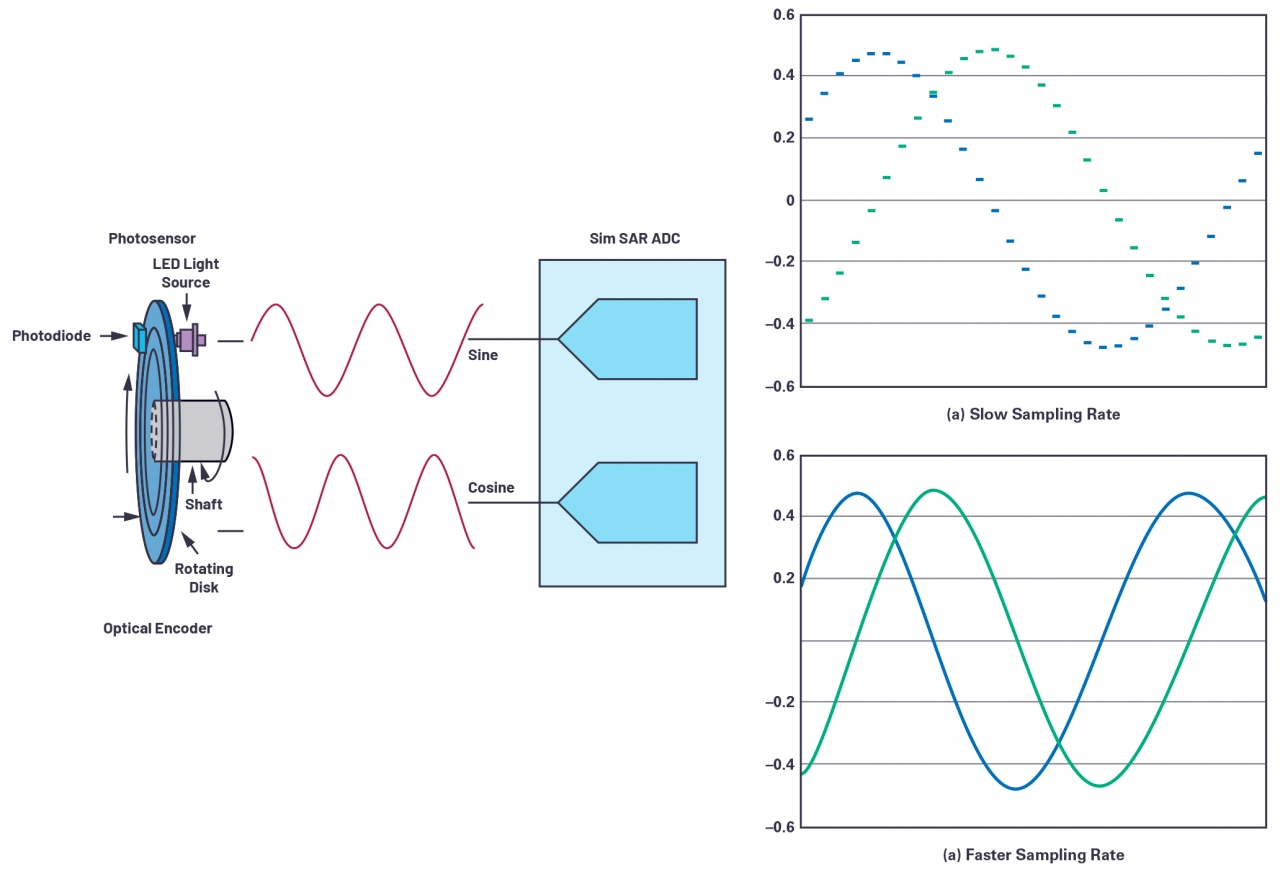
ADC의 고속 샘플링은 오버샘플링할 수 있도록 해, 잡음 성능을 추가로 향상시키고 일부 디지털 후처리 작업을 없앨 수 있다. 뿐만 아니라 ADC로부터 출력 데이터 레이트를 낮춰준다. 이는 더욱 느린 직렬 주파수 신호를 가능하도록 하며, 이에 따라 디지털 인터페이스를 간소화할 수 있다.
모터 위치 피드백 시스템은 모터 어셈블리에 탑재되며, 애플리케이션에 따라 모터 어셈블리 크기가 매우 작을 수 있다. 그렇기 때문에 제한적인 인코더 모듈 PCB 공간에 부품을 집어넣기 위해서는 크기가 중요하며, 소형 단일 패키지로 다중 채널을 제공할 경우 공간을 절약하는 게 유리하다.
광학 인코더 위치 피드백 설계 사례
[그림 4]는 광학 인코더 위치 피드백 시스템용으로 최적화된 솔루션을 보여준다. 이 회로를 절대 광학 인코더로 손쉽게 인터페이싱함으로써, 인코더로부터 차동 사인·코사인 신호를 포착할 수 있다.
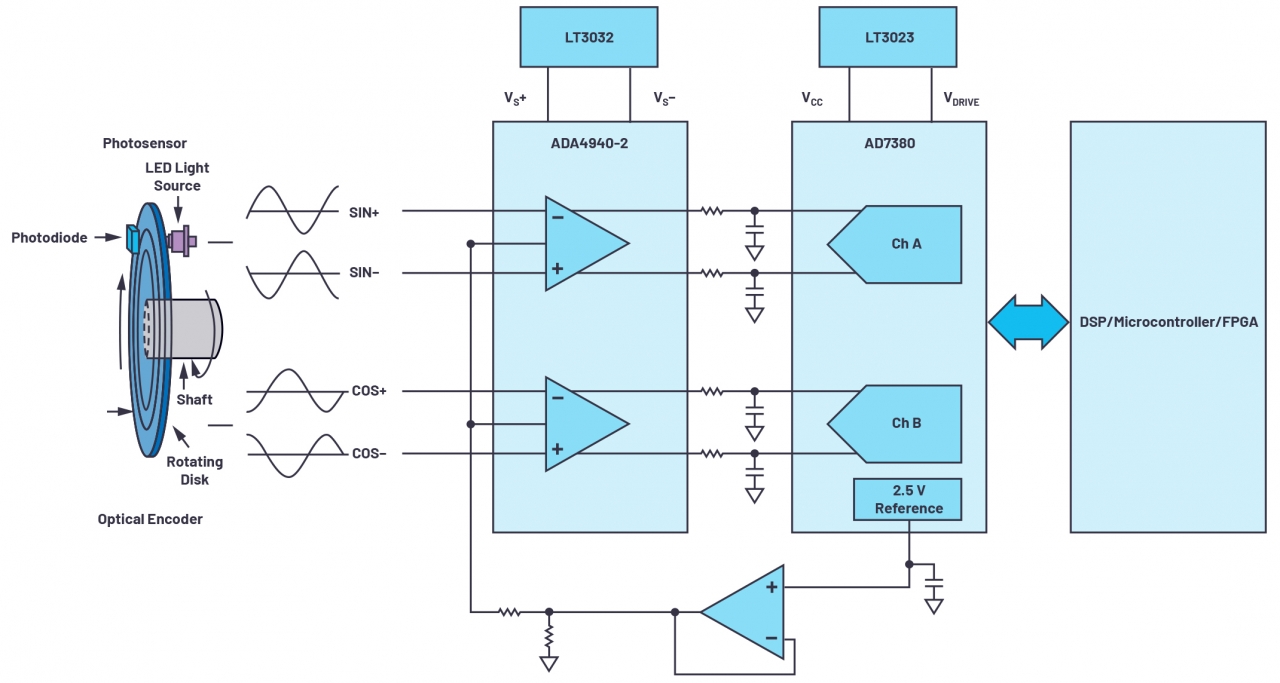
ADI의 ADA4940-2 프런트엔드 증폭기의 경우 듀얼 채널 저잡음 완전 차동 증폭기로 ADC인 AD7380을 구동하는 방식이다. AD7380은 소형 3×3mm LFCSP 패키지의 듀얼 채널 16비트 완전 차동 4MSPS 동시 샘플링 SAR ADC다. 이는 2.5V 레퍼런스를 내장해 최소한의 부품만을 요구한다.
ADC의 VCC, VDRIVE와 증폭기 드라이버의 전원 레일은 LT3023, LT3032와 같은 LDO 레귤레이터에 의해 제공된다. 이 레퍼런스 디자인에 1024 슬롯 광학 인코더를 연결하면 인코더 디스크의 1회 회전으로 1024 주기의 사인·코사인 신호가 생성된다.
16비트 AD7380은 각 인코더 슬롯을 216 코드로 샘플링해 전반적인 인코더 분해능을 26비트로 높여준다. 4MSPS의 높은 샘플링 레이트로 세밀한 사인·코사인 사이클을 포착할 수 있고, 인코더 위치도 정확하게 검출할 수 있다.
높은 샘플링 레이트 성능은 온 칩(On Chip)으로 오버샘플링할 수 있도록 함으로써, 디지털 ASIC이나 마이크로컨트롤러가 모터에 정밀한 인코더 위치를 제공하는 데 걸리는 시간을 줄일 수 있다. 또한, 2비트 분해능을 추가로 높일 수 있어 온 칩 분해능 부스트 기능에 손쉽게 이용할 수 있다. 분해능 부스트 기능을 사용해 정확도도 28비트로 높일 수 있다.
결론
모터 제어 시스템은 갈수록 더 작은 크기, 더 높은 정확도, 더 빠른 속도를 요구한다. 모터 위치 센싱 소자로서 광학 인코더를 사용할 수 있으며, 모터 위치 측정 용도의 광학 인코더 신호 체인은 정확도가 높아야 한다. 또한, 모터 위치 데이터를 정확하게 포착해 컨트롤러로 전달하기 위해서는 스루풋(Throughput)이 높은 고속 ADC가 필요하다. 이를 통해 위치 피드백 시스템에서 더 높은 정확도 수준을 달성하고 성능을 극대화할 수 있다.
글: 조나단 콜라오(Jonathan Colao) 애플리케이션 엔지니어
자료제공: 아나로그디바이스
- 이 글은 테크월드가 발행하는 월간 <EPNC 電子部品> 2020년 8월 호에 게재된 기사입니다.
그래도 삭제하시겠습니까?