

글 : 마크 맥콤(Marc McComb) 기술 교육 엔지니어, 보안·마이크로컨트롤러 및 기술 개발 사업부 / 마이크로칩 테크놀로지 www.microchip.com
스테퍼 모터는 고유한 높은 토크 및 포지셔닝 특성 외에도 특정 회전각으로 부하를 유지하는 기능을 갖추고 있다. 또한 이러한 모터는 피드백 회로와 관련된 추가 비용을 들이지 않고도 개방형 루프 포지셔닝 시스템의 일부로 구현할 수 있다. 하지만 스테퍼 모터는 진동에 취약하기 때문에 분해능이 낮은 스테핑 알고리즘을 사용하는 경우 등에 특정한 회전 속도에서 문제를 나타낼 수 있다.
예를 들어 2상 바이폴라 스테핑 모터를 사용하는 경우에는 각각의 풀스텝에 대해 두 위상을 동시에 구동하는 2상 가동(Two-Phase-On) 스위칭 알고리즘을 구현하는 것이 일반적이다. 각 위상의 전류 방향은 스텝 간에 교대로 변경되어 권선을 한 번에 하나씩 구동하는 풀 스테핑 방식에 비해 토크가 41% 더 높다.
그런데 여기서 회전자가 운동 에너지(관성)에 의해 정지해야 할 위치를 지나쳐 오버 슈팅 되는 등의 다양한 시스템 역학으로 인해 회전자가 스텝마다 약간씩 진동하는 경향이 있기 때문에 문제가 발생할 수 있다. 회전자는 자기 저항 (Reluctance)을 최소화하는 과정에서 자체 보정을 수행하고 반대 방향으로 이동해야 한다. 하지만 관성으로 인해 회전자가 다시 오버 슈팅 되기 때문에 이 과정은 운동 에너지가 사라질 때까지 반복된다.
설상가상으로 스텝 속도가 빨라지면 이러한 진동과 시퀀스의 다음 단계 펄스가 동시에 일어나는 경우가 자주 발생하곤 한다. 이렇게 되면 회전자가 이전 디텐트 위치에서 정지하지 못하기 때문에 스텝을 놓치게 된다. 모터가 개방형 루프 시스템의 일부로 사용되는 경우 등에서는 스텝을 놓치면 단순한 진동 및 잡음 문제에서 심각한 애플리케이션 문제에 이르기까지 다양한 결과가 발생할 수 있다.
첨단 하이브리드 스테핑 모터는 영구 자석 회전자 및 고정자 모두에 일반적으로 스텝 각도를 0.9° 및 1.8°로 줄일 수 있는 톱니를 구현하여 오버슈트(Overshoot)의 영향을 최소화한다. 분산된 이 구성은 자기장의 응집력을 대폭 증가시키므로 사용 가능한 토크가 높아진다. 이러한 모터를 마이크로스테핑 같은 첨단 스테핑 알고리즘과 함께 사용하면 회전 분해능을 높이면서 잡음과 진동을 줄일 수 있다.
마이크로스테핑은 각각의 풀스텝을 보다 작은 스텝인 4/8/16/32로 나눠 회전자의 회전을 원활하게 한다. 일반적으로 32마이크로스텝 이상으로는 풀스텝 각도를 나눠도 회전자의 움직임이 개선되지 않는다. 이 글에서 설명하는 방법에서는 이러한 마이크로스테핑을 수행하기 위해 사인/코사인(Sine/Cosine) 마이크로스테핑이라는 정현파 방식으로 각 위상의 전류를 변화시킨다. 앞 두 가지 변형된 사인/코사인 마이크로스테핑 기법을 예시한 것이다.
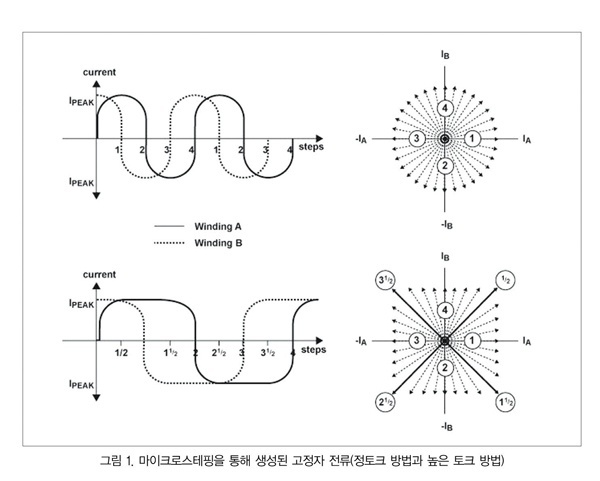
제시한 예에서는 두 권선 모두의 전류가 90°의 위상차로 구분된 2상 스테퍼 모터를 사용하고 있다. 여기서 360° 또는 한 번의 전체 전기적 주기는 회전자의 360° 기계적 회전과는 다르다는 점에 유의한다. 그림 1의 전류 다이어그램을 보면 한 번의 풀스텝이 실제로 90°의 전기각을 나타낸다는 것을 알 수 있다. 각 권선의 순시 전류는 다음 공식을 이용하여 구한다.
공식 1:
IA = IPEAK * sin θ
IB = IPEAK * cos θ
여기서 각 항의 의미는 다음과 같다.
IA = 권선 A의 순시 전류
IB = 권선 B의 순시 전류
IPEAK = 제조업체가 지정한 권선당 최대 전류 등급
θ = 전기각
그림 1의 오른쪽은 연관된 전류-위상 다이어그램으로, X축은 권선 A의 전류이고 Y축은 권선 B의 전류이다. 각 위상자(Phasor)의 길이는 지정된 전기각에서 결과로 생성된 두 전류의 벡터합으로, 이는 공식 2를 통해 계산된다.
공식 2:
위상자 길이 = IA2 + IB2
공식 3은 각 위상자의 길이가 지정된 각도에서 토크와도 비례함을 보여 준다.
공식 3:
TA = H * sin θ
TB = H * cos θ
여기서 각 항의 의미는 다음과 같다.
TA = 권선 A의 순시 토크
TB = 권선 B의 순시 토크
H = 제조업체에서 지정한 최대 정지 토크
그림 1에 나와 있는 첫 번째 방법에서는 두 권선 모두의 전류를 일정하게 변화시켜 회전자가 회전하는 내내 일정한 토크(모든 위상자의 길이가 같음)를 유지한다. 두 번째 방법에서는 높은 토크의 마이크로스테핑 알고리즘을 구현한다. 여기서 권선 하나의 피크 전류 레벨은 그대로 유지되고, 다른 권선의 전류는 0을 향해 점진적으로 떨어지다가 다시 역전되어 상승하게 된다. 그런 다음 다른 권선에 대해서도 이러한 시퀀스가 반복된다.
연관된 위상자 다이어그램에서는 토크에 발생하는 영향에 주목해야 한다. 다른 전환이 발생하는 동안 권선 하나의 전류가 최대치를 유지한 상태에서 위상자의 길이가 급격하게 바뀌어 첫 번째 방법에서 생성되는 것보다 높은 평균 토크를 제공한다. 특히 연관된 다이어그램에서는 스텝 ½(45°), 1½(315°), 2½(225°) 및 3½(135°)에서 위상자가 더 두껍게 나타난다. 이러한 지점은 알고리즘의 최대 토크 위치를 나타내며, 이는 두 위상이 모두 최대 정격 전류로 가동될 때 자연스럽게 나타난다. 또한 이러한 풀스텝 지점은 앞에서 설명한 2위상 가동 풀스텝 스위칭 알고리즘에서 사용되는 정지위치에 해당한다. 높은 토크의 사인/코사인 마이크로스테핑을 구현하기 위해 각 권선에 흐르는 전류를 변화시키는 데에는 다양한 방법이 동원될 수 있다.
이 글에 설명된 방법에서는 PIC16HV 616 마이크로컨트롤러(MCU) 및 연관된 주변 장치를 활용한다. ECCP(Enhanced Capture/Compare/PWM) 주변 장치는 듀티 사이클을 소프트웨어를 통해 프로그래밍할 수 있는 펄스폭 변조(PWM) 파형을 생성할 수 있다. 또한 이 주변 장치는 두 개의 핀을 동시에 변조할 수 있는 하프 브리지 출력 모드가 특징이다. 권선의 구동 회로에 연결된 PWM 출력 핀의 듀티 사이클을 변화시키면 그에 따라 권선의 전류가 바뀐다(공식 4 참조).
공식 4:
IWINDING = 듀티 사이클 x IPEAK
예를 들어 3V 스테퍼 모터의 정격 전류가 0.5A인 경우, 코일에서 50%의 듀티 사이클로 3V 전원을 변조시키면 평균 전류가 0.25A가 된다.
높은 토크 방법을 구현하기 위해 PIC16HV616의 펌웨어에서는 듀티 사이클의 LUT(Look-up-table)를 활용하여 마이크로스텝의 수에 해당하는 테이블 값의 수치로 정현파 전류 전환을 발생시킨다. 각각의 풀스텝은 90°의 전기각을 나타내므로 8개의 마이크로스텝/풀스텝 알고리즘을 공식 5에 따라 계산하면 표 1의 테이블 값을 얻을 수 있다.
공식 5:
90°/8 = 11.25°/스텝
듀티 사이클(스텝 수) = (sin (스텝 수 * 11.25)) * 100(듀티 사이클을 퍼센티지(%)로 얻기 위함)
예:
스텝 2 듀티 사이클 계산
듀티 사이클(스텝 2) = (sin (2 * 11.25°)) * 100 = 38%(정수로 반올림)
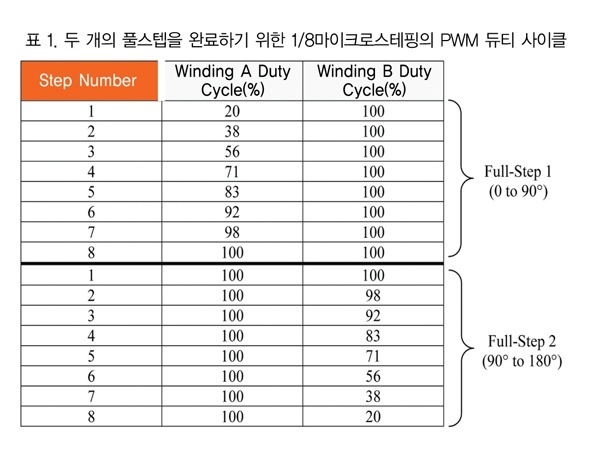
표1에는 두 개의 완전한 풀스텝이 나와 있다. 표의 절반 윗부분에서는 권선 A의 구동 회로에 대해 듀티 사이클을 변화시켜 권선 B의 전류를 최대치로 유지한 상태에서 코일을 관통하는 전류를 0에서 IPEAK로 전환한다. 처음 8개의 마이크로스텝이 끝나면 전기각 90° 또는 풀스텝 하나가 완료된 것이다. 다음 8개의 마이크로스텝에서는 권선A에서의 전류는 그대로 유지되지만, 권선 B에서는 이전의 90° 전환에서 권선 A를 끌어올리는 데 사용된 듀티 사이클 값의 순서를 뒤바꿈으로써 전류가 점차 떨어지게 된다. 그림 2는 PIC16HV616을 사용한 회로 다이어그램의 예를 나타낸다.
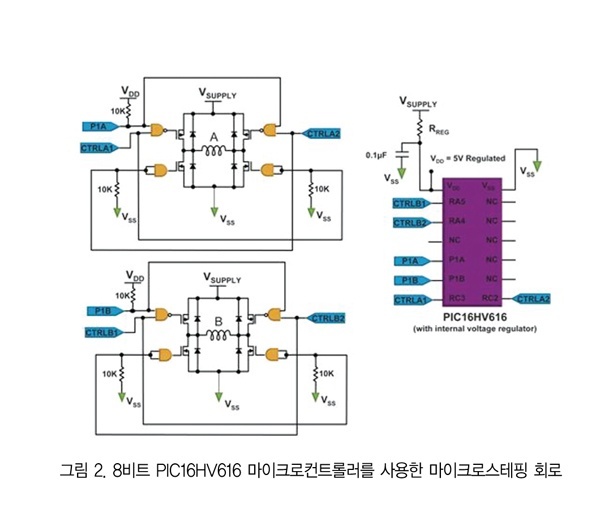
이 8비트 PIC16HV616 MCU는 보다 높은 공급 전압을 활용할 수 있게 할 뿐 아니라 외부에 연결해야 하는 레귤레이션 부품 수를 줄일 수 있게 해주는 영구적인 내부 5V 션트 레귤레이터를 갖고 있다. 이로써 전류와 권선에서 발생시키는 토크를 최적화할 수 있다. 필요한 외부 전류 제한 저항(RREG)의 크기는 PIC16HV616 데이터시트에 나와 있는 공식을 사용하여 결정한다.
이 구동 회로는 각 하프 브리지의 하이 사이드를 PWM 출력 핀(P1A/P1B) 및 4개의 범용 I/O 포트 핀(RA5(CTR LB1), RA4(CTRLB2), RC3(CTRLA1), RC2(CTRLA2))과 연결하는 AND 및 NAND 버퍼 IC로 구성되어 있다. 포트 핀을 하이(HIGH) 사이드로 구동하면 PWM 핀에 신호를 활성화하는 한편, 연관된 N 채널 MOSFET을 켬으로써 코일 전류 방향이 형성된다. PWM 출력 핀은 입력이나 출력으로 구성될 수 있다. 출력으로 구성될 경우에는 PWM 파형이 핀에 나타난다. 반대로 입력으로 구성될 경우, PWM 핀은 임피던스가 높은 상태가 되어 핀에 연결된 풀업 저항이 라인을 하이 사이드로 클램핑하도록 한다.
표 1에 제시된 처음 8개의 마이크로스텝을 구현하려면 CTRLA1에 연결된 RC3 핀을 하이 사이드로 구동하여 권선 A 브리지의 오른쪽 아래 N 채널 MOSFET을 켠다. P1A 핀은 출력으로 구성되며 펌웨어는 LUT를 통해 스테핑을 시작하여 PWM 출력의 듀티 사이클을 각 스텝에서 계산된 값으로 변경한다.
권선 B 전류는 최대치로 유지된 상태에서 펌웨어는 CTRLB1 핀을 하이 사이드로 구동하고 P1B 핀을 높은 임피던스의 핀으로 구성한다. P1B에 연결된 10K 저항은 라인을 하이 사이드로 클램핑하고 권선에는 최대 전류가 흐르게 된다. 나머지 알고리즘은 이러한 단계의 단순한 변형에 불과하다. 요약하면, 높은 토크의 마이크로스테핑을 활용하면 오버슈트를 억제하여 스테퍼 모터의 반응을 전기적으로 약화시킬 수 있다.
이 글에서 설명한 응용 예에서는 PIC16HV616 마이크로컨트롤러와 몇 가지 일반적인 주변 장치를 함께 구현하여 이러한 작업을 손쉽게 수행하고 있다. 디자인에 임베디드 솔루션을 통합하면 인텔리전스 레벨이 강화되어 전류 제한 기법이 통합된 첨단 드라이버를 더 많이 수용할 수도 있고, 시스템 역학이 변경됨에 따라 구동 회로의 작동을 수정할 수도 있다. 디자이너는 이러한 방식을 통해 몇 가지 추가 툴을 자유롭게 사용하여 이 독특한 모터와 관련된 이점을 최대한 활용할 수 있게 될 것이다.
참고문헌:
de Silva, C.W., 2005, Mechatronics: An Integrated Approach, CRC Press, New York, NY, 1312 p.
Condit, R, 2004, Microchip Technology, AN906: Stepper Motor Control Using the PIC16F684 (DS00906B), http://www.microchip. com/stellent/idcplg?IdcService=SS_GET_PAGE&nodeId=1824&appnote=en012150 (December 2, 2008)
Yedamale, P, Chattopadhyay, S, 2002, Microchip Technology, AN822: Stepper Motor Microstepping with PIC18C452 (DS00822A), http://www.microchip.com/stellent/idcplg?IdcSer vice=SS_GET_PAGE &nodeId=1824&appnote=en011997 (December 2, 2008)
회원가입 후 이용바랍니다.
개의 댓글
댓글 정렬
BEST댓글
BEST 댓글
답글과 추천수를 합산하여 자동으로 노출됩니다.
댓글삭제
삭제한 댓글은 다시 복구할 수 없습니다.
그래도 삭제하시겠습니까?
그래도 삭제하시겠습니까?
댓글수정
댓글 수정은 작성 후 1분내에만 가능합니다.
내 댓글 모음