

[테크월드=김경한 기자] 지난 11월호에서는 젯봇의 추가적인 동작을 활성화 시키기 위한 펌웨어를 제작했다. 12월 호에서도 지난 호에 이어 소프트웨어 설정을 진행하면서 젯봇의 다양한 동작을 활성화해 본다.

1. Headless Mode(헤드 프리 모드)로 젯봇에 연결
이 모드에서 젯슨 나노(Jetson Nano) 개발자 키트는 USB 케이블을 통해 컴퓨터에 직접 연결된다. 젯봇(Jetbot)에서 네트워크 연결이 필요하지 않으며 네트워크에서 IP 주소를 확인할 필요가 없다.
항상 이 형태의 모드는 192.168.55.1:8888이다. 즉, 모니터를 젯슨 나노 개발자 키트에 직접 연결할 수 없다. 이 접근 방식은 젯슨 나노의 메모리 리소스를 절약하고 추가 하드웨어(모니터, 키보드, 마우스)가 필요하지 않다.
[헤드 프리 모드의 단계]
① 로봇 카의 전원 스위치를 열어야 한다. [그림 1]과 같이 냉각 팬이 회전하고, 젯슨 나노, 또는 확장 보드에 약간의 LED 표시등이 표시된다.

② [그림 2]와 같이 USB 케이블로 젯슨 나노를 컴퓨터에 연결한다.

③ 잠시 기다리면 시스템이 성공적으로 부팅되면서 PC에 두 장치 간의 통신을 위한 드라이브(Linux File-Stor Gadget USB Device)가 표시된다[그림 3].
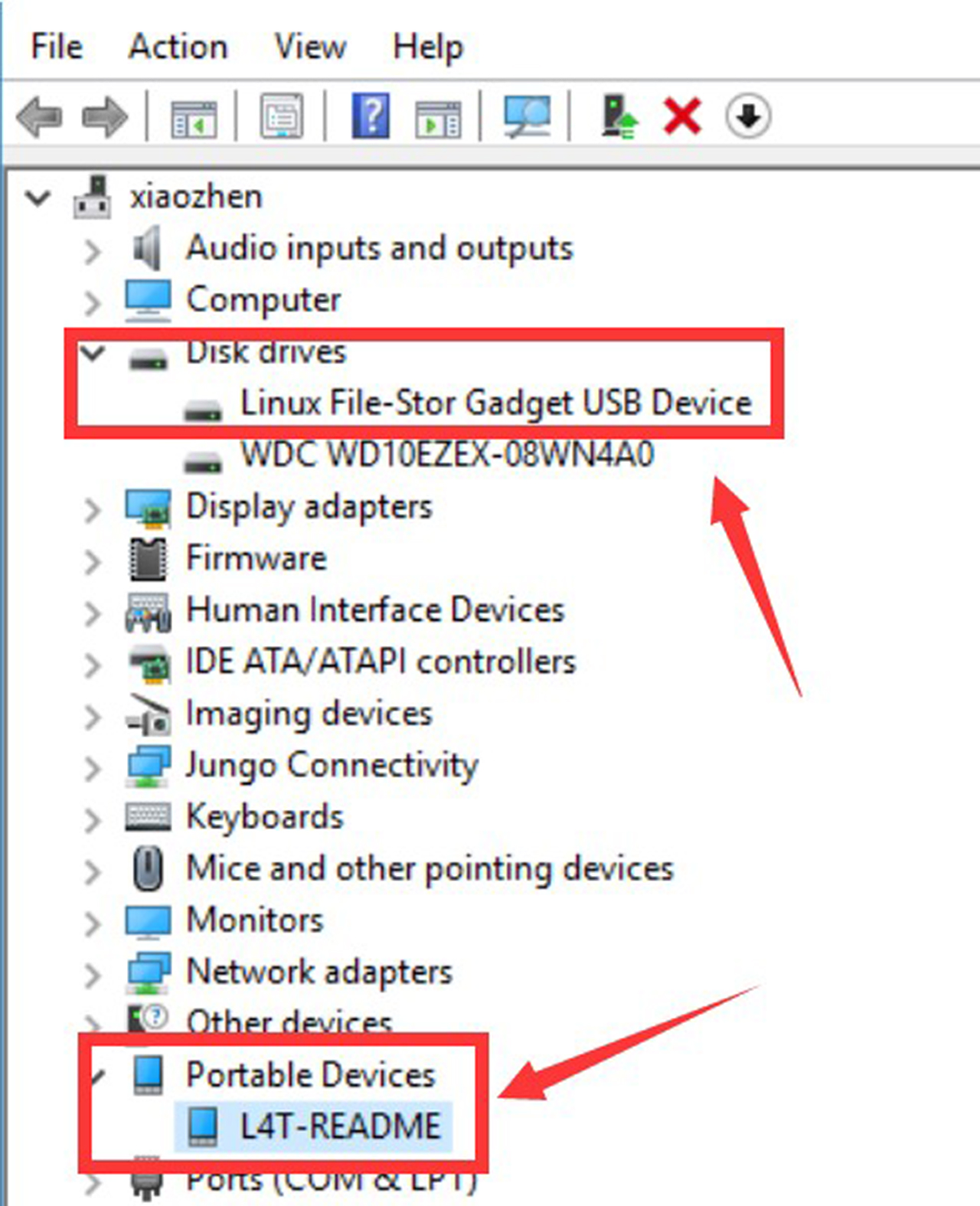
※ 참고: 먼저 자동차의 전원 스위치를 켠 다음 USB 케이블로 컴퓨터에 연결해야 한다.
위의 장치가 PC에 나타난 후 네트워크에 연결하지 않고, Xshell / Putty를 통해 젯봇에 연결할 수 있다. 호스트 번호는 고정 IP 주소 ‘192.168.55.1’이다.
젯봇의 해당 사용자 이름과 비밀번호를 입력하면 정상적으로 로그인 할 수 있다.
[그림 4]부터 [그림 8]까지와 같이 ‘Xshell’ 기준이다.





2. 젯봇 연결 Wi-Fi
2.1 방법 1
헤드 프리 모드를 사용해 PC에 연결하고 명령어로 연결을 구성한다.
다음 명령을 사용해 젯봇을 Wi-Fi 네트워크에 연결하는 단계를 따른다[그림 9].
nmcli dev wifi

WIFI를 연결하려면 다음 명령을 입력하면 된다[그림 10].
sudo nmcli dev wifi connect wifi_name password 12345678

WIFI에 연결한 후, IP 주소를 보기 위해서는 다음 명령어를 입력한다[그림 11].
Ifconfig

새 IP 주소로 젯봇을 연결하고 PC에 다음 명령을 입력해 제어한다[그림 12].
ssh -p 22 jetbot@192.168.1.196

2.2 방법 2
젯봇을 HDMI 화면에 연결하고 마우스와 키보드를 사용해 그래픽 인터페이스에서 구성한다.
2.3 방법 3
윈도우를 사용해 원격 데스크톱(Remote Desktop Connection) / VNC에 로그인한다.
새로운 버전(New_Version) 이미지를 사용하는 경우, 개방 VNC 서비스로 다음 명령을 넣는다.
./openvino
1) [그림 13]부터 [그림 15]까지와 같이 헤드 프리 모드로 PC를 연결하면, PC에서 원격 로그인 응용 프로그램을 찾을 수 있다.



2) 그런 다음 ‘연결’을 클릭한다. 성공적으로 연결되면 [그림 16]과 같은 인터페이스를 볼 수 있다.

타사 데스크톱이므로 Wi-Fi 구성과 같은 주요 정보를 조작할 때 비밀번호를 입력해야 한다.
3) 비밀번호를 입력한 후, 오른쪽 상단의 Wi-Fi 아이콘으로 이동해 Wi-Fi를 구성할 수 있다.
- 고정 IP 설정:
설정에 연결된 Wi-Fi를 입력한다[그림 17].

4) 설정해야 하는 IP 주소를 설정한다.
※ N은 OTE: T 자신의 IP 주소를 다른 장치에 의해 점유해서는 안 된다.
5) 서브넷 마스크를 입력한다. 기본값은 ‘255.255.255.0’이다.
6) 일반적으로 ‘192.168.1.1’인 게이트웨이를 입력한다. 위의 서브넷 마스크와 게이트웨이는 실제 네트워크 환경에 따라 다르며 참조만 제공된다.
2.4 소프트웨어 패키지 업데이트
소프트웨어 소스를 업데이트하려면 다음 명령을 입력한다.
sudo apt-get 업데이트
설치된 소프트웨어 패키지를 업데이트하려면 다음 명령을 입력한다.
sudo apt-get 전체 업그레이드
2.5 전원 모드 구성
젯봇에는 5W 모드와 MAXN 모드의 두 가지 전원 모드가 있다.
2.1 섹션에서 Jtop의 현재 전원 모드를 볼 수 있다.
현재 전원 모드는 두 번째 인터페이스 --- GPU에서 볼 수 있다[그림 18].

또는 세 번째 인터페이스인 CTRL에서 현재 전원 모드를 볼 수 있다[그림 19].

두 전원 모드의 가장 큰 차이점은 다음과 같다.
m0-MAXN 모드에서는 4개의 코어 CPU1, CPU2, CPU3, CPU4가 모두 켜진다(H igh -P 성능 모드).
m1-5W 모드에서는 4 개 코어 CPU1, CPU2, CPU3, CPU4 중 CPU1과 CPU2 만 실행되고 CPU3과 CPU4가 절전 모드로 전환된다. 이때 데이터 처리는 CPU만 수행한다(저전력 모드).
따라서 5W 전원 모드일 때는 m0-MAXN 모드보다 훨씬 느리다. 긴 배터리 수명을 추구하지 않는 경우 MAXN 모드를 사용해 젯봇이 제공하는 성능으로 진행하는 걸 권장한다.
다음 명령 줄을 사용해 현재 전력 소비 모드를 볼 수도 있다[그림 20].
sudo nvpmodel –q

mo-MAXN 모드를 전환하려면 다음 명령을 입력한다.
sudo nvpmodel -m0
m1-5W 모드를 전환하려면 다음 명령을 입력한다.
sudo nvpmodel -m1
※ 특히 AI 모델을 학습할 때 고성능 모드로 전환하면 컴퓨팅 성능이 향상될 수 있다.
마치며
현재까지 나온 스마트 RC카 중 성능이 높은 편에 속하는 이 젯봇은 여러 가지 기능을 가지고 있지만 이 기능들을 활성화시키기 위해서는 많은 부분에서 플랫폼 준비와 설정이 필요하다. 초보자가 하기에는 어려운 형태의 스마트 RC카이지만 본인 AI 플랫폼, 이미지 분류, 객체 감지 분야를 배우거나 개발 계획이 있으면 이 RC카 만큼의 좋은 교육자료와 완제품 형태는 없다. 초기에는 어렵지만 여기에 나와있는 정보를 운용해서 개발한다면 어려움 없이 개발할 수 있을 것으로 여겨진다.
자료제공: IC뱅큐
그래도 삭제하시겠습니까?